معرفی محصول
ماژول درایور موتور L298N یکی از پرکاربردترین ماژولها برای کنترل موتورهای DC و استپر در پروژههای الکترونیکی و رباتیک است. این ماژول بر پایه آیسی قدرتمند L298N از شرکت STMicroelectronics طراحی شده و دارای دو پل H (Dual H-Bridge) است که امکان کنترل دو موتور DC به صورت مستقل یا یک موتور استپر دو فاز را فراهم میکند. این درایور توانایی کار با ولتاژ تا 35 ولت و جریان خروجی حداکثر 2 آمپر برای هر کانال را دارد و به کمک ورودیهای منطقی استاندارد، به راحتی با میکروکنترلرهایی مانند Arduino، Raspberry Pi، ESP32 و سایر بردهای توسعه قابل استفاده است. وجود رگولاتور داخلی 5 ولت، هیتسینک آلومینیومی، ترمینالهای پیچی و دیودهای محافظ در برابر ولتاژ برگشتی موتور باعث شده این ماژول عملکردی پایدار و قابل اعتماد در کاربردهای مختلف داشته باشد.
با استفاده از پایههای ENA و ENB میتوان سرعت موتور را با سیگنال PWM کنترل کرد و پایههای IN1 تا IN4 جهت چرخش موتور را تعیین میکنند. همین ویژگیها این ماژول را به گزینهای محبوب برای پروژههای رباتیک، خودروهای هوشمند و سیستمهای حرکتی تبدیل کرده است.
ویژگیها
مبتنی بر تراشه قدرتمند L298N با دو پل H
امکان کنترل دو موتور DC یا یک موتور استپر
پشتیبانی از کنترل سرعت موتور با PWM
جریان خروجی تا 2 آمپر برای هر کانال
دارای رگولاتور داخلی 5 ولت برای تغذیه بخش منطقی
دارای دیودهای محافظ داخلی برای جلوگیری از ولتاژ برگشتی موتور (Back EMF)
مجهز به هیتسینک آلومینیومی برای دفع حرارت بهتر
دارای ترمینالهای پیچی برای اتصال آسان موتور و تغذیه
سازگار با Arduino، Raspberry Pi، ESP و سایر میکروکنترلرها
کاربردها
ماژول L298N به دلیل توان خروجی مناسب و کنترل ساده، در بسیاری از پروژههای الکترونیکی و رباتیکی استفاده میشود، از جمله:
کنترل دو موتور DC در رباتها
راهاندازی موتورهای استپر دو فاز
ساخت خودروهای رباتیکی و ماشینهای هوشمند
پروژههای Arduino و Raspberry Pi
سیستمهای موقعیتیابی مبتنی بر موتور
بازوهای رباتیک کوچک
کنترل اکچویتورهای خطی سبک
سیستمهای اتوماسیون و مکانیزمهای حرکتی
پروژههای آموزشی رباتیک و مکاترونیک
نحوه راهاندازی و استفاده
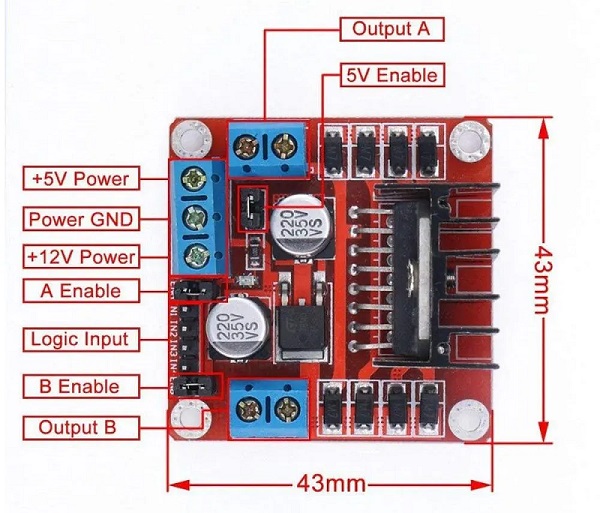
برای استفاده از ماژول درایور L298N ابتدا باید منبع تغذیه موتور را به ترمینال VIN و GND متصل کنید. سپس خروجیهای OUT1 و OUT2 برای موتور اول و OUT3 و OUT4 برای موتور دوم استفاده میشوند.
کنترل جهت و سرعت موتور از طریق پایههای منطقی انجام میشود:
IN1 و IN2 برای کنترل جهت موتور اول
IN3 و IN4 برای کنترل جهت موتور دوم
ENA فعالسازی و کنترل سرعت موتور اول (PWM)
ENB فعالسازی و کنترل سرعت موتور دوم (PWM)
در صورتی که ولتاژ درایو موتور بین 7 تا 12 ولت باشد، میتوان از رگولاتور 5 ولت داخلی ماژول برای تغذیه بخش منطقی استفاده کرد. در این حالت نباید به پایه +5V ولتاژ خارجی اعمال شود.
اگر ولتاژ موتور بیش از 12 ولت باشد، لازم است جامپر 5V Enable را جدا کرده و تغذیه 5 ولت بخش منطقی را از منبع خارجی تامین کنید.
نکات مهم هنگام استفاده
از اتصال صحیح قطبهای موتور و منبع تغذیه اطمینان حاصل کنید.
از عبور جریان بیش از حد مجاز (2A برای هر کانال) خودداری کنید.
در صورت استفاده طولانیمدت با جریان بالا، خنکسازی مناسب در نظر بگیرید.
برای عملکرد پایدارتر، بهتر است تغذیه موتور و تغذیه منطقی جداگانه باشد.